Mehr Sicherheit und Effizienz im Tunnelbau – DFKI-Software steuert Wartungsroboter für Bohrwerkzeug
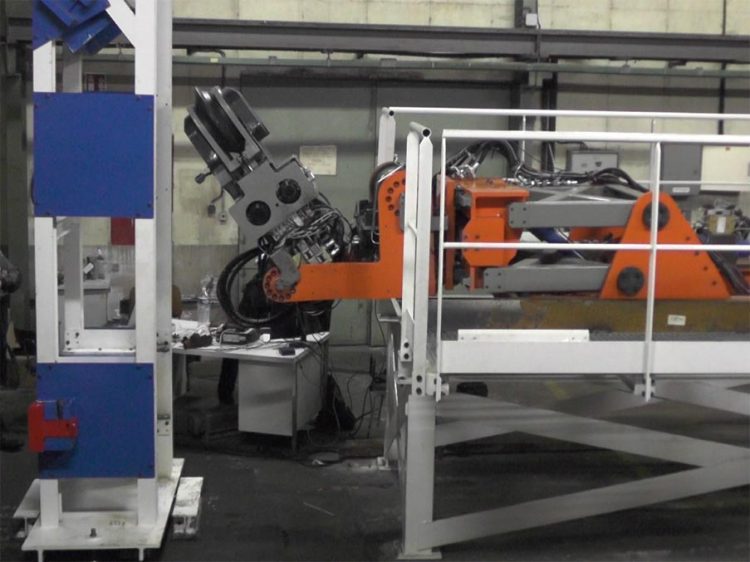
Demonstration der Steuerung des Wartungsroboters (DFKI GmbH)
NeTTUN (Neue Technologien für Tunnel- und Tiefbauarbeiten) adressierte alle Aspekte des Tunnelbaus und zielte auf deren Verbesserung: vom Bau über das Management bis hin zur Wartung von Tunnelbauwerken. Dies beinhaltete u.a. die Entwicklung von Schneidwerkzeugen mit deutlich erhöhter Lebensdauer, eines modernen Multi-Sensor-Bodenvorhersagesystems für schnelles und effektives Vorrausschauen während des Bohrens sowie von Systemen zur Kontrolle der Auswirkungen des Tunnelbaus auf umgebende Strukturen.
Eine entscheidende Zielsetzung von NeTTUN, welche das DFKI Robotics Innovation Centers unter Leitung von Prof. Dr. Frank Kirchner gemeinsam mit der Firma NFM Technologies verfolgte, lag auf der Erhöhung der Sicherheit und Effizienz beim Bohrvorgang. Sie entwickelten ein robustes Roboter-Wartungssystem für Tunnelbohrmaschinen, das nicht nur die Automatisierung von Routineaufgaben, etwa die Inspektion und den Austausch von Bohrwerkzeug (disc cutter oder drag bits) ermöglicht, sondern auch die Bewältigung von komplexen Inspektions- und Wartungsarbeiten durch teilautonome Fernsteuerung.
Auf diese Weise lässt sich zum Beispiel die Produktivität der Bohrarbeiten steigern, da Leerlaufzeiten während der Wartung vermieden werden. Gleichzeitig verringert sich das Risiko für die menschlichen Betreiber, deren Präsenz in der gefährlichen Umgebung nicht mehr unbedingt notwendig ist.
Das entwickelte System setzt sich aus dem mit zwei Greifern ausgestatteten Roboterarm HECTOR (NFM Technologies), der über fünf Freiheitsgrade auf sieben beweglichen Achsen verfügt, sowie aus einer vom Robotics Innovation Center konzipierten Mensch-Maschine-Schnittstelle zur Steuerung des Roboters zusammen.
Die Schnittstelle in Form einer ergonomischen 3D-Maus besitzt eine graphische Benutzeroberfläche mit Statusanzeige, Simulations- und Live-Kameraansicht. Die Software zur High-Level-Steuerung des Robotersystems, die ebenfalls vom DFKI entwickelt wurde, ermöglicht es, den Arm und die Greifer mithilfe der 3D-Maus gleichzeitig und unabhängig voneinander zu betätigen – dies umfasst sowohl die Steuerung der einzelnen Achsen und des Endeffektors als auch die teilautonome Bewegungssteuerung.
In einer typischen Aufgabensequenz befindet sich das Robotersystem zunächst innerhalb einer Schutzkammer in der Tunnelbohrmaschine. Von dort bewegt es sich automatisch auf eine vordefinierte Position außerhalb der Kammer. Je nach zu inspizierendem Werkzeug kann der menschliche Operator den Roboter nun auf eine geeignete Position bewegen.
Sobald das System die gewünschte Position erreicht hat, wird der Modus auf Teleoperation umgestellt und der Operator führt es in den Schneidkopf der Bohrmaschine. Dank des Live-Kamerabildes und der Sensorinformationen kann er so die Schneidwerkzeuge aus sicherer Entfernung inspizieren. Dabei erhält er durch die haptische Schnittstelle eine Rückmeldung über die Kräfte zwischen Greifer und Objekt. In dem Fall, dass der Operator ein verbrauchtes oder defektes Schneidwerkzeug identifiziert, wird dieses vom Wartungsroboter ausgetauscht.
Das Projekt NETTUN wurde vom 01.09.2012 bis zum 28.02.2017 von der Europäischen Union im Rahmen des 7. EU-Forschungsrahmenprogramms unter der Finanzierungsvereinbarung Nr. 280712 gefördert. Neben dem DFKI und NFM Technologies gehörten folgende Partner zum internationalen Projektkonsortium:
École Centrale de Lyon (Koordinator), BG Ingénieurs Conseils SA, Delft University of Technology, National Technical University of Athens, École Polytechnique Fédérale de Lausanne, Ingegneria dei Sistemi S.p.A., Inexia, École Nationale des Travaux Publics de l’État, ME2i, Metro C S.p.A., Obrascón Huarte Lain (OHL), Razel-Bec, University of Leeds, Société Nationale des Chemins de fer Français, Tallinn University of Technology, Università degli studi di Roma Tor Vergata, Université de Limoges, Cistème, MI Partners.
Weitere Informationen:
www.dfki.de/robotik/forschung/projekte/nettun.html
Bildmaterial:
Unter http://uk.dfki.de/extern/20170430_NeTTUN stehen Bilder zum Download bereit. Diese können Sie mit Nennung des Copyrights gerne verwenden.
Kontakt:
Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI) GmbH
Robotics Innovation Center
Mehmed Yüksel
E-Mail: Mehmed.Yüksel@dfki.de
Telefon: 0421 178 45 6604
Pressekontakt:
Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI) GmbH
Unternehmenskommunikation Bremen
E-Mail: uk-hb@dfki.de
Telefon: 0421 178 45 4180
Media Contact
Alle Nachrichten aus der Kategorie: Architektur Bauwesen
Die zukunftsorientierte Gestaltung unseres Wohn- und Lebensraumes erhält eine immer größer werdende Bedeutung. Die weltweite Forschung in den Bereichen Architektur und Bauingenieurwesen leistet hierzu einen wichtigen Beitrag.
Der innovations-report bietet Ihnen hierzu interessante Berichte und Artikel, unter anderem zu den Teilbereichen: Nachhaltiges Bauen, innovative Baumaterialien, Bautenschutz, Geotechnik, Gebäudetechnik, Städtebau, Denkmalschutz, Bausoftware und Künstliche Intelligenz im Bauwesen.




Neueste Beiträge

Arzneimittelforschung mit zellbasierten Testsystemen
Bayerische Förderung: Fraunhofer in Würzburg treibt Arzneimittelforschung mit zellbasierten Testsystemen voran. Am Freitag, den 13. Dezember 2024, besuchte Staatssekretär Tobias Gotthardt aus dem bayerischen Wirtschaftsministerium das Würzburger Fraunhofer-Institut für Silicatforschung…

Substrate aus Schafswolle sollen Torf im Gartenbau ersetzen
Die Hochschule Hof arbeitet in einem neuen Forschungsprojekt an der Entwicklung nachhaltiger Substrate für die Pflanzenproduktion. Unter der Leitung von Dr. Harvey Harbach untersucht eine Forschungsgruppe gemeinsam mit regionalen und…

Wie Geothermische Energie Bayerns Grüne Zukunft Durch Nachhaltige Energie Gestaltet
Das Bayerische Staatsministerium für Wissenschaft und Kunst hat die Förderung des Forschungsverbundes „Geothermische Allianz Bayern“ verlängert, wobei die Universität Bayreuth (UBT) für weitere vier Jahre weiterhin als Mitglied beteiligt bleibt….