Drahtlose Energie-Übertragung aus dem All
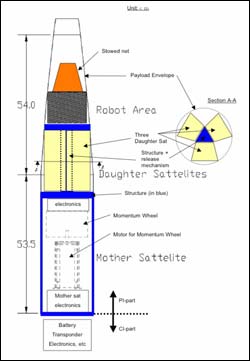
Die Mutter-, Tochtersatelliten, das Netz und die Roboter sollen Platz finden
Die drahtlose Energie-Übertragung stellt an und für sich schon eine technische Herausforderung dar. Noch „spaciger“ aber wird es, wenn Sonnenenergie drahtlos aus dem All übertragen werden soll. Roboter, die auf einem im Weltraum aufgespannten Netz krabbeln, sollen beweisen, dass das möglich ist. Roboter der TU Wien sind mit dabei.
Die erste zu bewältigende Testaufgabe: ein Muttersatellit und drei Tochtersatelliten werden mit einer Rakete ins All geschossen. In dem kleinen Muttersatelliten mit einem Durchmesser von 60 cm und 70 cm Höhe müssen – in der Pilotphase – drei Tochtersatelliten, zwei Roboter und das Netz Platz finden (Abb. 1). Natürlich dürfen die zu transportierenden Gegenstände auch nur wenig wiegen. Zunächst wird das Netz zwischen den Tochtersatelliten aufgespannt, während die Roboter einige Minuten im schwerelosen Zustand ausharren und sich danach ca. drei Minuten krabbelnd auf dem Netz (20 – 40 m Seitenlänge) fortbewegen (Abb. 3).
Vom Fußballroboter zum krabbelnden Astronauten
Insgesamt werden im Pilotversuch zwei Roboter eingesetzt – einer aus den USA (von NASA JPL) und einer aus Österreich. Während die US-Amerikaner auf Roboter mit Beinen setzen, ist das Wissenschafterteam rund um Prof. Peter Kopacek von der TU Wien von der Qualität ihrer quaderförmigen Roboterfußballer überzeugt. „Unser Ziel ist es, unsere bewährten Fußballroboter so zu modifizieren, dass sie sich problemlos auf dem Netz bewegen können. Wir haben den großen Vorteil, dass wir mit unseren technischen Überlegungen nicht bei Null beginnen müssen.“
Peter Kopaceks neueste Idee: sein Roby Space soll als „Sandwich“ agieren (Abb. 4). „Die Roboter müssen über die kleinen Knoten im Netz kommen, dürfen nicht hängen bleiben aber den Kontakt mit dem Netz auch nicht verlieren. Eines Tages sollen die Roboter mit den Solarzellen nämlich selbstständig in der Lage sein, auf ihrem Platz am Netz zu krabbeln, sich nach der Sonne auszurichten und die höchstmögliche Energie-Effizienz zu erreichen. Wir glauben daher, dass sich ’Sandwich-Roboter’ am besten dafür eignen. Das Netz ist sozusagen die Wurst, der Roby der Sandwich.“
All jenen zum Trotz, die Roboterfußball als sinnlose Kinderei und Spielerei abtun, ist man auf der Suche nach geeigneten All-Robotern auf jene von Kopacek gestoßen. Leopold Summerer vom „Advanced Concepts Team“ der >> European Space Agency (ESA) ist durch die Roboter-WM 2003 in Wien auf die erfolgreichen Roboterfußballer des Institutes für Handhabungsgeräte und Robotertechnik der TU Wien aufmerksam geworden und war sofort begeistert. „Das ist ein high-risk high-return Experiment bei dem man sich auf keinerlei vorhandene Daten stützen kann. Schlaue Ideen, technische Kompetenz und ein motiviertes Team sind entscheidend. Das TU-Institut von Prof. Kopacek hat nicht nur uns sondern auch unsere japanischen Kollegen überzeugt: mit den Roboterfußballern haben sie gezeigt, daß sie ausgehend von einer Idee einen komplexen Roboter von A bis Z erfolgreich konzipieren, bauen, programmieren, testen und einsetzen können.“
Mission mit strengen Auflagen
Für die Roboter wäre es im All natürlich vorteilhaft, wenn die Maschen des Netzes, auf dem sie sich bewegen, sehr dicht wären. Die Kehrseite: je mehr Maschen, desto schwerer wird das Netz. Um beiden Anforderungen gerecht zu werden, hat man sich in der Goldenen Mitte getroffen. Die Maschendichte wird voraussichtlich 5 cm x 5 cm betragen. „Wir haben versucht, das 0,3 Millimeter ’dicke’ Netz mit aller Gewalt zu zerreißen, es ist uns aber nicht gelungen“, beantwortet Peter Kopacek die Frage nach dem Netz-Material – hochfester, ganz dünner Kunststoff.
Auch für die Roboter wurde eine erlaubte Maximalgröße von 10 cm x 10 cm x 5 cm festgelegt. Aber nicht nur die Gewichts- und Größenbeschränkungen bereiten Prof. Kopacek etwas Kopfzerbrechen, denn die Roboter werden beim Transport in der Rakete ziemlich durchgeschüttelt. „Die herkömmlichen Tests, die wir bei unseren Roboterfußballern durchführen, reichen hier bei weitem nicht aus,“ ist Kopacek überzeugt. Auch bezüglich der Mechanik müssen entsprechende Überlegungen angestellt werden. Wie reagiert sie im schwerelosen Zustand und wie kann man das im Voraus testen?
Ohne ESA und ASA kein wissenschaftliches Leiberl
Die Mission „Robotic Experiment on Japanese Sounding Rocket“ zur drahtlosen Energieübertragung mittels Roboter wird voraussichtlich im Sommer 2005 von Japan starten. Bis dahin müssen noch viele technische Herausforderungen gelöst werden.
Damit der Weltraumausflug gelingt, muss das Netz beispielsweise so aus der Rakete gleiten und sich zwischen den drei Tochtersatelliten aufspannen, dass es sich nicht verknotet (Abb. 5) – das ist aber Gott sei Dank eine andere technologische „Baustelle“ als die des Institutes für Handhabungsgeräte und Robotertechnik.
Kein Problem hingegen stellt die Versorgung des physisch noch nicht vorhandenen Weltraum-Roboters der TU Wien mit der erforderlichen Energie dar. „Unsere Fußballroboter kommen 90 Minuten mit den Batterien über die Runden, das dürfte für die Weltraummission wohl reichen.“
Ermöglicht wird der Roboter-Weltraumausflug durch eine Projektvergabe der European Space Agency (ESA) an die TU Wien, die sich dabei europaweit gegen mehrere Mitbewerber durchgesetzt hat, und die Unterstützung der >> Austrian Space Agency (ASA).
Media Contact
Alle Nachrichten aus der Kategorie: Energie und Elektrotechnik
Dieser Fachbereich umfasst die Erzeugung, Übertragung und Umformung von Energie, die Effizienz von Energieerzeugung, Energieumwandlung, Energietransport und letztlich die Energienutzung.
Der innovations-report bietet Ihnen hierzu interessante Berichte und Artikel, unter anderem zu den Teilbereichen: Windenergie, Brennstoffzellen, Sonnenenergie, Erdwärme, Erdöl, Gas, Atomtechnik, Alternative Energie, Energieeinsparung, Fusionstechnologie, Wasserstofftechnik und Supraleittechnik.




Neueste Beiträge

Ist der Abrieb von Offshore-Windfarmen schädlich für Miesmuscheln?
Rotorblätter von Offshore-Windparkanlagen unterliegen nach mehrjährigem Betrieb unter rauen Wetterbedingungen einer Degradation und Oberflächenerosion, was zu erheblichen Partikelemissionen in die Umwelt führt. Ein Forschungsteam unter Leitung des Alfred-Wegener-Instituts hat jetzt…
Per Tierwohl-Tracker auf der Spur von Krankheiten und Katastrophen
DBU-Förderung für Münchner Startup Talos… Aus dem Verhalten der Tiere können Menschen vieles lernen – um diese Daten optimal auslesen zu können, hat das Münchner Startup Talos GmbH wenige Zentimeter…

Mit Wearables die Gesundheit immer im Blick
Wearables wie Smartwatches oder Sensorringe sind bereits fester Bestandteil unseres Alltags und beliebte Geschenke zu Weihnachten. Sie tracken unseren Puls, unsere Schrittzahl oder auch unseren Schlafrhythmus. Auf welche Weise können…