Künftig ohne Zaun Hand in Hand mit dem Roboter: Forschungen zum Miteinander von Mensch und Maschine
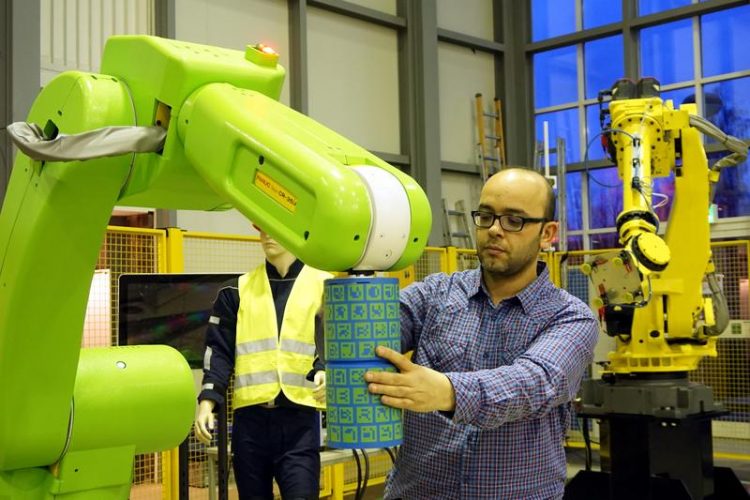
In der BIBA-Forschungshalle hat der Aufbau des Demonstrators für das Projekt "Autonomes Assistenzsystem zur Unterstützung von MRK-Montageprozessen" (AutARK) begonnen. Foto: Aaron Heuermann, BIBA
Kommt man einem arbeitenden Industrieroboter zu nah, stellt dieser seine Arbeit augenblicklich ein. Wegen der hohen Verletzungsgefahr gibt es hierzu strengste Sicherheitsbestimmungen. Darum arbeiten Roboter in Käfigen.
In der Produktion ist eine enge Hand-in-Hand-Zusammenarbeit zwischen Mensch und Roboter bisher kaum möglich, wird aber zunehmend gebraucht.
Das neue Forschungsprojekt „Autonomes Assistenzsystem zur Unterstützung von MRK-Montageprozessen“ (AutARK) sucht hier Lösungen. MRK steht für Mensch-Roboter-Kollaboration.
Mit dem Aufbau eines Demonstrators am BIBA – Bremer Institut für Produktion und Logistik an der Universität Bremen haben die Forschungen nun Fahrt aufgenommen.
In dem zweijährigen Vorhaben arbeiten neben dem BIBA die Partner Pumacy Technologies (Berlin/Bremen, Koordinator), Block Transformatoren-Elektronik (Verden) und Arend Prozessautomation (Wittlich) zusammen.
Es hat einen Gesamtumfang von 1,9 Millionen Euro und wird mit knapp 1,3 Millionen Euro vom Bundesministerium für Wirtschaft und Energie (BMWi) gefördert. Projektträger des im BMWi-Programm Digitale Technologien für die Wirtschaft (PAiCE – Platforms, Additive Manufacturing, Imaging, Communication, Engineering) eingegliederten Vorhabens ist das Deutsche Zentrum für Luft- und Raumfahrt (DLR).
Für Entlastung und Effizienz
Beim Anwendungspartner Block Transformatoren-Elektronik erfordert die Montage von Transformatoren einerseits manuelle Feinarbeit. Andererseits müssen verschiedene Bauteile wie Spulen mit einem Gewicht von bis zu 27 Kilogramm und Transformatorenbleche für den bis zu 160 Kilogramm schweren Kern präzise gehandhabt und ohne Beschädigungen verbaut werden.
Gewichte, die für die Mitarbeiterinnen und Mitarbeiter auf Dauer belastend sind oder nicht ohne Kran bewegt werden dürfen. Hier könnte ein körpernah arbeitender Roboter helfen, die körperlich anstrengenden oder ergonomisch ungünstigen Belastungen sowie den zeitlichen Aufwand auf ein Mindestmaß zu reduzieren.
Insbesondere für Roboter mit mittleren Traglasten besteht Bedarf nach größeren Kollaborationsgraden, das heißt nach einer Minimierung des Sicherheitsabstands zwischen Mensch und Roboter.
Bislang ist dies überwiegend nur bei Robotern mit geringen Traglasten möglich. Eine Herausforderung hierbei ist auch das Erfüllen der Sicherheitsanforderungen an kollaborierende Industrierobotersysteme.
Es fehlen generalisierte und zertifizierte Ansätze, die basierend auf neuen Sensorkonzepten sowie der Fusion und intelligenten Verarbeitung geeigneter Sensordaten eine Zusammenarbeit mit Industrierobotern ermöglichen. Außerdem werden derartige Daten bislang nur selten für eine kontextbezogene Unterstützung der Mitarbeiterinnen und Mitarbeiter oder deren Qualifizierung sowie Fort- und Ausbildung genutzt.
Autonom, körpernah, sensorbasiert und systemneutral
Aufgabe in dem Projekt ist es, ein autonomes, körpernahes, sensorbasiertes und systemneutrales MRK-Assistenzsystem für die Montage zu entwickeln. Es soll Prozesse innerhalb verschiedener Anwendungsfälle besonders in klein- und mittelständischen Unternehmen (KMU) vereinfachen und die MRK in der industriellen Montage wirtschaftlich nachhaltiger gestalten. Das Assistenzsystem soll zu weniger Unterbrechungen in Montageprozessen führen und so Kosten reduzieren und die Effizienz in der Produktion steigern.
Mit ihren Forschungen wollen die Projektpartner dazu beitragen, Hürden in KMU zur Einführung von MRK-Systemen abzubauen und manuelle Montageprozesse aufzuwerten. „Durch unsere Entwicklung sollen die Arbeitsbedingungen an ergonomisch ungünstigen Arbeitsplätzen verbessert und die Zusammenarbeit mit Robotern bereits von der Ausbildung an gefördert werden“, sagt BIBA-Forscher und -Projektleiter Aaron Heuermann.
Neue Art von Assistenzsystemen mithilfe Künstlicher Intelligenz
In dem Projekt wird das Potenzial dieser neuen Art von Assistenzsystemen im Hinblick auf Flexibilität, kognitive Entlastung, Ergonomie und Sicherheit exemplarisch an Anwendungsfällen erprobt, evaluiert und demonstriert – etwa bei der Montage von Transformatoren während des Produktionsprozesses und für das Schweißen mechanischer Bauteile in der Schweißerinnen- und Schweißer-Ausbildung.
Die Arbeit des BIBA in dem Vorhaben beinhaltet die Entwicklung einer autonomen körpernahen Sensorik sowie einer roboter- beziehungsweise maschinennahen Sensorik, die in einem Sensorframework fusioniert werden und so die Mensch-Roboter-Kollaboration in der Montage ermöglichen.
Sowohl der Mensch als auch die Maschine werden mit Sensoren ausgestattet, die Daten aus dem Arbeitsprozess an das System liefern. Dieses verarbeitet die Daten mithilfe intelligenter Algorithmen (Künstliche Intelligenz) und liefert sicherheitsrelevante und unterstützende Informationen zurück. Das Assistenzsystem lernt also permanent dazu (maschinelles Lernen).
Dank dieses Systems kann der Roboter seine Bewegungsabläufe ohne Unterbrechung des Produktionsprozesses anpassen und verharrt in einer Gefahrensituation ad hoc im Stillstand, so dass Gefährdungen der Menschen ausgeschlossen werden. So wird es möglich, den Roboter aus seinem Käfig herauszuholen und ihn direkt mit den Monteurinnen und Monteuren zusammenarbeiten zu lassen.
Besondere Herausforderung: die Sicherheit
„Eine besondere Herausforderung sind die sehr hohen Ansprüche an die Sicherheit“, erklärt Heuermann. „Hier können wir unter anderem auf unsere Forschungsergebnisse aus dem Vorgängerprojekt Integrierte Schutz- und Sicherheitskonzepte in Cyberphysischen Arbeitsumgebungen (InSA) bauen.“
Vor wenigen Tagen wurde ein kollaborativer Roboter für den Forschungsdemonstrator des Projekts in Betrieb genommen. Außerdem steht den Projektpartnern für ihre Forschungen in der BIBA-Halle auch ein größerer Industrieroboter zur Verfügung. Bereits im Sommer 2020, so der Plan, will das Projektteam demonstrieren, wie die entlastende, sichere Hand-in-Hand-Zusammenarbeit von Mensch und Maschine in der Montage künftig aussehen kann.
Prof. Dr.-Ing. Klaus-Dieter Thoben
Telefon: 0421 218-50 006, E-Mail: tho@biba.uni-bremen.de
Aaron Heuermann, M. Sc.,
Telefon: 0421 218-50 172, E-Mail: her@biba.uni-bremen.de
http://www.biba.uni-bremen.de
http://www.autark-projekt.de
http://www.biba.uni-bremen.de/presse/pressemitteilungen/2019/pressemitteilung-vo… (11 Fotos zur Pressemitteilung)
Media Contact
Alle Nachrichten aus der Kategorie: Informationstechnologie
Neuerungen und Entwicklungen auf den Gebieten der Informations- und Datenverarbeitung sowie der dafür benötigten Hardware finden Sie hier zusammengefasst.
Unter anderem erhalten Sie Informationen aus den Teilbereichen: IT-Dienstleistungen, IT-Architektur, IT-Management und Telekommunikation.



Neueste Beiträge

Arzneimittelforschung mit zellbasierten Testsystemen
Bayerische Förderung: Fraunhofer in Würzburg treibt Arzneimittelforschung mit zellbasierten Testsystemen voran. Am Freitag, den 13. Dezember 2024, besuchte Staatssekretär Tobias Gotthardt aus dem bayerischen Wirtschaftsministerium das Würzburger Fraunhofer-Institut für Silicatforschung…

Substrate aus Schafswolle sollen Torf im Gartenbau ersetzen
Die Hochschule Hof arbeitet in einem neuen Forschungsprojekt an der Entwicklung nachhaltiger Substrate für die Pflanzenproduktion. Unter der Leitung von Dr. Harvey Harbach untersucht eine Forschungsgruppe gemeinsam mit regionalen und…

Wie Geothermische Energie Bayerns Grüne Zukunft Durch Nachhaltige Energie Gestaltet
Das Bayerische Staatsministerium für Wissenschaft und Kunst hat die Förderung des Forschungsverbundes „Geothermische Allianz Bayern“ verlängert, wobei die Universität Bayreuth (UBT) für weitere vier Jahre weiterhin als Mitglied beteiligt bleibt….