Mikroroboter-Kollektive zeigen vielseitige Schwarm-Bewegungsmuster
Mikroroboter-Kollektive zeigen vielseitige Schwarm-Bewegungsmuster
MPI für Intelligente Systeme
Kollektives Verhalten und Schwarm-Bewegungsmuster sind überall in der Natur zu finden. Auch Roboter können so programmiert werden, dass sie in Schwärmen agieren. Forschenden des Max-Planck-Instituts für Intelligente Systeme, der Cornell University und der Shanghai Jiao Tong University haben Kollektive von Mikrorobotern entwickelt, die sie in jeder gewünschten Formation bewegen können. Das Forschungsprojekt wurde in Nature Communications veröffentlicht.
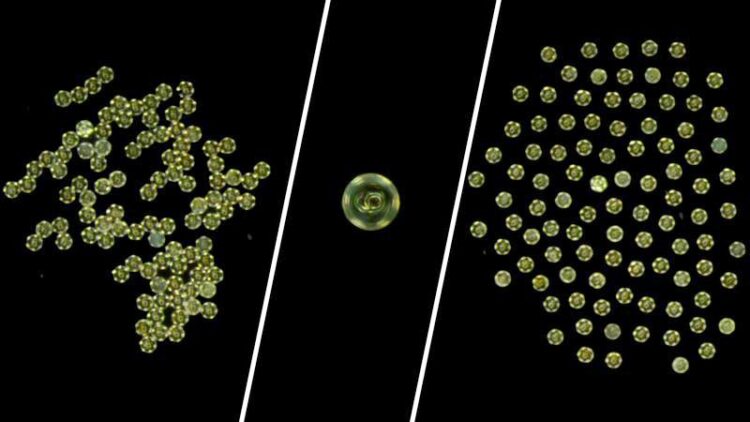
Forschenden des Max-Planck-Instituts für Intelligente Systeme (MPI-IS), der Cornell University und der Shanghai Jiao Tong University ist es gelungen, Mikroroboter zu entwickelt, die sich als Kollektiv in jeder beliebigen Formation bewegen können. Die Partikel sind in der Lage, ihre Bewegungsmuster schnell neu zu rekonfigurieren. Auf einer Wasseroberfläche schwimmend können sich die Miniaturroboter im Kreis drehen, den Boogie tanzen, sich zu einem Klumpen zusammenballen, sich wie Gas ausbreiten oder eine gerade Linie bilden wie aneinander gereihte Perlen auf einer Schnur.
Ein einzelner Roboter ist etwas größer als der Durchmesser eines menschlichen Haars. Sie werden aus einem Polymer in 3D gedruckt und mit einer dünnen Kobaltschicht überzogen. Dank des Metalls sind die Mikroroboter magnetisch geladen. Drahtspulen, durch die Strom hindurchfließt und auf diese Weise ein Magnetfeld erzeugen, umgeben den Versuchsaufbau. Das Magnetfeld ermöglicht es, die Teilchen in einem ein Zentimeter breiten Wasserbecken präzise zu steuern. Wenn die Mikroroboter zum Beispiel eine Linie bilden, können die Forscher:innen die Roboter so bewegen, dass sie Buchstaben ins Wasser „schreiben“. Das Forschungsprojekt von Gaurav Gardi and Prof. Metin Sitti vom MPI-IS, Steven Ceron und Prof. Kirstin Petersen von der Cornell University und von Prof. Wendong Wang der Shanghai Jiao Tong University mit dem Titel „Microrobot Collectives with Reconfigurable Morphologies, Behaviors, and Functions“ wurde am 26. April 2022 in Nature Communications veröffentlicht.
Kollektives Verhalten ergibt sich aus den Interaktionen der Roboter
Kollektives Verhalten und Schwarm-Bewegungsmuster sind überall in der Natur zu finden. Ein Vogelschwarm zeigt dieses Verhalten ebenso wie Fische. Auch Roboter können so programmiert werden, dass sie in Schwärmen agieren – und machen dabei sogar prominent von sich reden. Ein Technologieunternehmen stellte vor einigen Jahren mit einer Drohnen-Lichtshow einen neuen Guinness-Weltrekord auf, indem Ingenieure mehrere hundert Drohnen so programmierten, dass die Fluggeräte wie ein Vogelschwarm minutenlang ein beeindruckendes Muster in den Nachthimmel zeichneten. Jede Drohne in diesem Schwarm war mit Rechenleistung ausgestattet, die sie in alle mögliche Richtungen steuerte. Was aber, wenn das einzelne Teilchen so winzig ist, dass für Rechenleistung kein Platz ist? Wenn ein Roboter gerade mal 300 Mikrometer klein ist, bietet dieser nicht genügend Platz für einen Rechner, dem man einen Algorithmus einprogrammieren könnte.
Drei unterschiedliche Kräfte sind im Spiel, um den Mangel an Rechenleistung auszugleichen. Eine ist die magnetische Kraft. Zwei Magnete mit entgegengesetzten Polen ziehen sich an. Zwei gleiche Pole stoßen sich ab. Die zweite Kraft ist die flüssige Umgebung, das Wasser um die Partikel herum. Wenn Teilchen in einem Wasserstrudel schwimmen, verdrängen sie Wasser und beeinflussen so die anderen Teilchen im System. Die Geschwindigkeit des Strudels und seine Größe bestimmen, wie die Teilchen interagieren. Drittens: Wenn zwei Teilchen nebeneinander schwimmen, neigen sie dazu, aufeinander zuzudriften. Sie krümmen die Wasseroberfläche so, dass sie sich langsam annähern. Wissenschaftler und Cheerio-Fans nennen dies den Cheerio-Effekt: Wenn man zwei der Cerealien auf Milch treiben lässt, stoßen sie irgendwann zusammen. Umgekehrt kann dieser Effekt auch dazu führen, dass sich zwei Dinge gegenseitig abstoßen (eine Haarnadel entfernt sich von einem Cheerio).
Drei Kräfte ermöglichen die Rekonfigurierung
Die Wissenschaftler:innen nutzen alle drei Kräfte, um ein koordiniertes, kollektives Bewegungsmuster von mehreren Dutzend Mikrorobotern innerhalb eines System zu erzeugen. Ein Video zeigt, wie die Roboter durch einen Parkour steuern. Dabei nimmt die Gruppe die Formation an, die am besten passt. Gibt es nur einen schmalen Durchgang, reihen sich die Mikroroboter hintereinander auf, um sich dann wieder auszubreiten, wenn sie herauskommen. Die Wissenschaftler:innen können die Roboter auch tanzen lassen. Außerdem zeigen sie, wie sie eine winzige Plastikkugel in den Wasserbehälter legen und dann die Roboter zu einem Bündel zusammenziehen, um die schwimmende Kugel vor sich herzuschieben. Sie können die winzigen Teilchen auch in zwei Zahnrädern platzieren und die Teilchen so bewegen, dass sie beide Zahnräder zum Drehen bringen. Auch ein geordnetes Muster ist möglich, bei dem jedes Teilchen den gleichen Abstand zu seinem Nachbarn einhält. All diese verschiedenen Fortbewegungsarten und Formationen werden durch externe Rechenleistung ermöglicht: Ein Algorithmus wird programmiert, der ein rotierendes oder oszillierendes Magnetfeld erzeugt, das wiederum die gewünschte Bewegung und Rekonfigurierung auslöst.
„Je nachdem, wie wir die Magnetfelder verändern, verhalten sich die Mikroroboter anders. Wir verändern eine Kraft und dann eine andere, bis wir das gewünschte Bewegungsmuster erhalten. Wenn wir das Magnetfeld in den Spulen zu stark drehen, ist die Kraft, die das Wasser in Bewegung setzt, zu stark und die Partikel entfernen sich voneinander. Sind wir zu langsam, ist der Cheerio-Effekt, der die Teilchen anzieht, zu groß. Wir müssen ein Gleichgewicht zwischen diesen drei Faktoren finden“, erklärt Gaurav Gardi. Er ist Doktorand in der Abteilung für Physische Intelligenz am MPI-IS und zusammen mit Steven Ceron von der Cornell University einer der Erstautoren der Publikation.
Ein Modell für zukünftige biomedizinische und umwelttechnische Anwendungen
Das Zukunftsszenario für solche Mikroroboter-Kollektive ist, noch kleiner zu werden. „Unsere Vision ist es, ein System zu entwickeln, das noch winziger ist. Wir wollen die Partikel bald nur einen Mikrometer klein bauen. Diese Kollektive könnten möglicherweise eines Tages in den menschlichen Körper eindringen und durch komplexe Umgebungen navigieren, um zum Beispiel Medikamente zu verabreichen, Blockaden zu lösen oder schwer zugängliche Bereiche zu stimulieren“, erklärt Gardi.
„Roboter-Kollektive, die schnell zwischen verschiedenen Bewegungsmustern wechseln können, sind sehr selten. Solch versatile Systeme sind sehr von Vorteil, wenn sie in komplexen Umgebungen eingesetzt werden. Wir freuen uns, dass es uns gelungen ist, dieses vielseitige und robuste Mikroroboter-System zu entwickeln. Wir sehen unsere Forschung als eine Blaupause für künftige biomedizinische Anwendungen, minimalinvasive Behandlungen oder um die Umwelt zu schützen“, fügt Metin Sitti hinzu, der die Abteilung für Physische Intelligenz leitet. Sitti gilt als ein Pionier auf dem Forschungsgebiet der Mikro- und Milli-Robotik sowie der Physischen Intelligenz künstlicher Systeme.
Sehen Sie den Youtube-Film hier: https://www.youtube.com/watch?v=q91AWmTBzG8
High-resolution Fotos und das Video gibt es in dieser Dropbox: https://www.dropbox.com/sh/p0losaj6dw4f855/AAAH_MgBDb2G3wBuw4JrhTnla?dl=0
Wissenschaftliche Ansprechpartner:
Gaurav Gardi
Ph.D. Student in der Abteilung für Physische Intelligenz am MPI-IS
gardi@is.mpg.de
Originalpublikation:
https://www.nature.com/articles/s41467-022-29882-5
Weitere Informationen:
https://is.mpg.de/de/news/microrobot-collectives-display-versatile-movement-patt…
Media Contact
Alle Nachrichten aus der Kategorie: Informationstechnologie
Neuerungen und Entwicklungen auf den Gebieten der Informations- und Datenverarbeitung sowie der dafür benötigten Hardware finden Sie hier zusammengefasst.
Unter anderem erhalten Sie Informationen aus den Teilbereichen: IT-Dienstleistungen, IT-Architektur, IT-Management und Telekommunikation.



Neueste Beiträge

Du bist, was du isst – Stanford-Studie verbindet Ballaststoffe mit Modulation von Anti-Krebs-Genen
Die Ballaststofflücke: Ein wachsendes Problem in der amerikanischen Ernährung Ballaststoffe sind bekanntlich ein wichtiger Bestandteil einer gesunden Ernährung, doch weniger als 10 % der Amerikaner konsumieren die empfohlene Mindestmenge. Eine…

Vertrauen Sie Ihrem Bauchgefühl – RNA-Protein-Entdeckung für eine bessere Immunität
HIRI-Forscher entschlüsseln Kontrollmechanismen der Polysaccharidverwertung in Bacteroides thetaiotaomicron. Forschende des Helmholtz-Instituts für RNA-basierte Infektionsforschung (HIRI) und der Julius-Maximilians-Universität (JMU) Würzburg haben ein Protein sowie eine Gruppe kleiner Ribonukleinsäuren (sRNAs) in…

ASXL1-Mutation: Der verborgene Auslöser hinter Blutkrebs und Entzündungen
Wissenschaftler zeigen, wie ein mutiertes Gen rote und weiße Blutkörperchen schädigt. LA JOLLA, CA – Wissenschaftler am La Jolla Institute for Immunology (LJI) haben herausgefunden, wie ein mutiertes Gen eine…